
반응형
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- python
- 자윯주행
- 프로그래머스
- 디지털시스템설계 #verilog #module #port #구조문
- create3
- ros #rviz #onedayproject #Lane Keeping #Lane Changing #차선 변경
- control
- 자율주행
- 데브코스
- Slam
- 운영체제 #working set #working set algorithm #file system
- turtlebot
- ubuntu
- turtlebot4
- 프로그래머스 #데브코스 #자율주행
- planning
- 자율주행 #opencv #perception #control #제어 #인지
- 운영체제 #page replacement algorithm
- Gazebo
- Linux
- Raspberry Pi
- pathplanning
- rviz
- ROS
- morai #자율주행 #데브코스 #planning&control #ros #ubuntu
- TOF
- 인턴
- MORAI
- ROS2
- 데이터베이스 #정규화 #이상현상 #함수종속
Archives
쓰레기 개발자
Turtlebot4에 TOF 센서 연결하는법 - 1 본문
- GPIO란 General-Purpose Input/Output의 약자로 직역하면 범용 입출력 핀이다. 싱글보드 컴퓨터나 마이크로컨트롤러(MCU)에서 외부장치(센서, 모니터 등)와 상호작용 할 수 있게 제공되는 디지털 핀이다. 전기 신호로 입력을 받을수도 있고, 출력으로 전송도 할 수 있다.
- I2C란 IC 사이에 통신 링크를 제공하는 양방향 2와이어 직렬 버스이다. 쉽게 말해 선 두개로 직렬 통신하는 프로토콜이다. 선의 종류는 SDA와 SCL이 있다.
- SDA : 데이터를 주고 받음
- SCL : 타이밍 동기화를 하기 위함
TOF 센서를 I2C를 통해 라즈베리파이의 GPIO의 남는 USER-PORT에 연결하여 TOF 센서 데이터를 파일로 저장 & 시각화를 하려고 한다.
- 사용할 수 있는 GPIO 확인
아래 명령어로 I2C 연결 디바이스 주소를 확인하는 패키지를 설치한다.
sudo apt update
sudo apt install i2c-tools
그 후에 다음 명령어로 I2C 어댑터의 리스트를 확인한다.
sudo i2cdetect-l
다음과 같이 두개가 뜨는것을 볼 수 있다.

i2c-1 (1번 버스), bcm2835는 Broadcom SoC 칩셋에서 제공하는 I2C 컨트롤러이다. Raspberry Pi 4에서 기본적으로 사용되는 I2C 버스이다.
i2c-3 (3번 버스), 300000002.i2c는 펌웨어가 할당한 시스템 장치이므로 여기에 TOF는 연결하면 안된다.
다음 명령어로 1, 3번 버스에 뭐가 있는지 확인한다.
sudo i2cdetect -y 1
sudo i2cdetect -y 3
터틀봇에선 다음과 같이 뜬다.
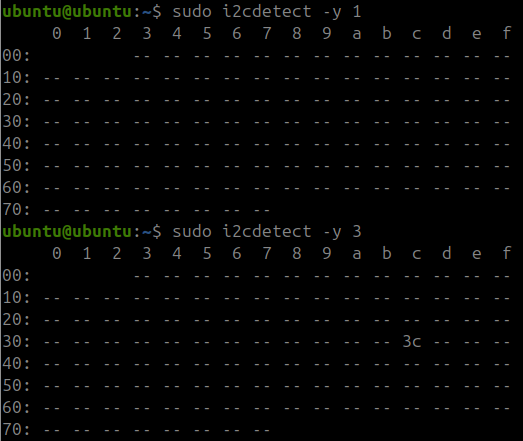
다른 센서는 이미 연결이 되어 있으니 TOF는 i2c 1번 버스로 할당된 GPIO 2번(SDA)과 3번(SCL)에 연결하면 된다. (공식문서 참고)
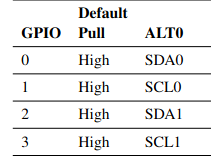
** GPIO 0번과 1번은 EEPROM 통신용이므로 사용하면 내부 저장장치와 충돌할 가능성 있음 **
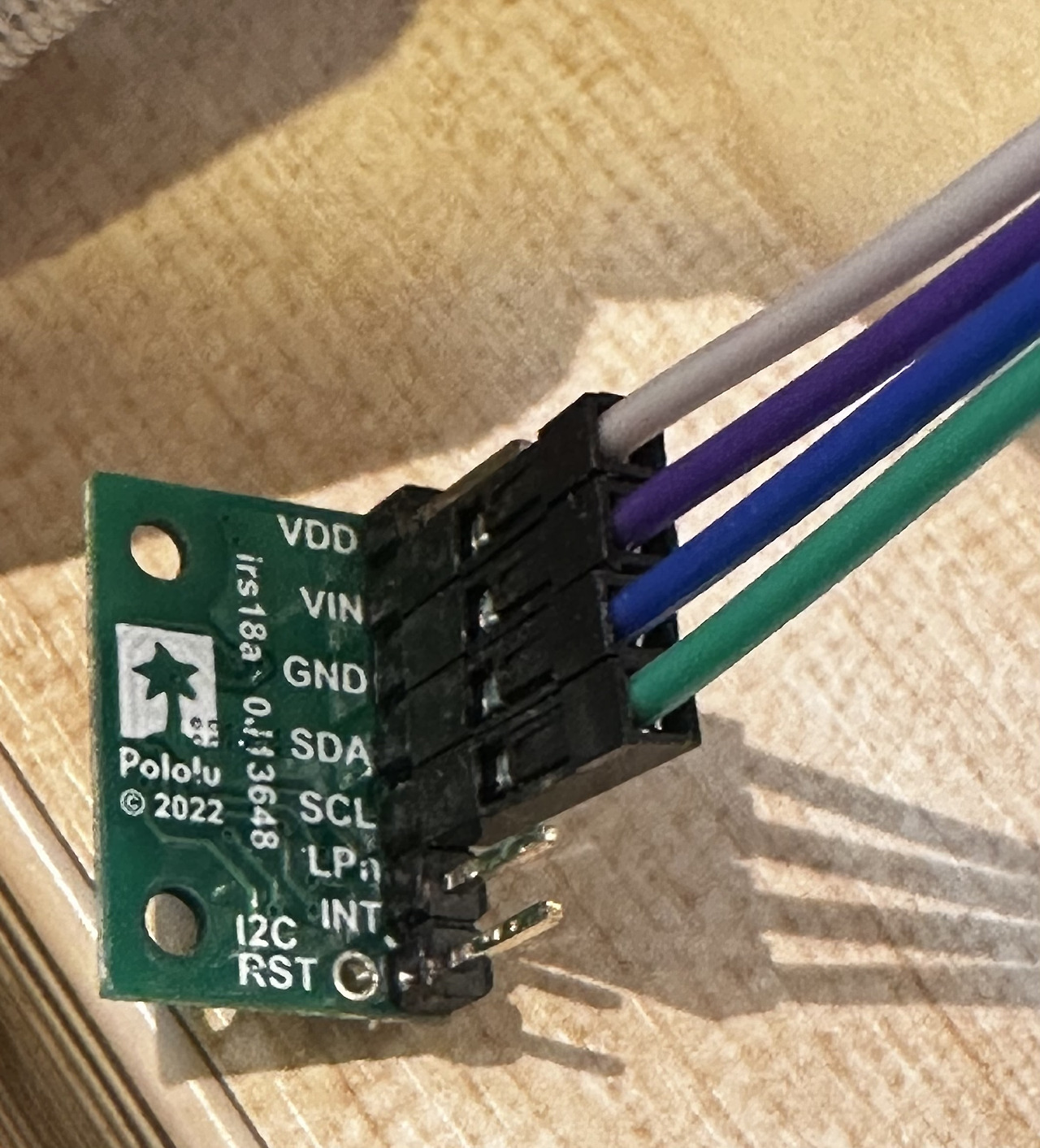
위 사진은 TOF 센서인 VL53L7CX이다. 이제 Turtlebot4의 2x20 RPi Connector Pinout을 기준으로 꽂을 위치를 잡으면
|
Turtlebot4 (2*20)
|
TOF 센서
|
|
Pin # 1
|
VIN
|
|
GND 아무곳에나
|
GND
|
|
Pin # 3
|
SDA
|
|
Pin # 5
|
SCL
|
위와 같이 연결하면 된다. ** GPIO # 가 아닌 Pin # **
하지만 터틀봇에는 2x12 User I/O Pinout가 있다. 모든 USER_PORT는 2*12 보조 커넥터로 라우팅 돼있다고 공식 문서에서 설명한다.
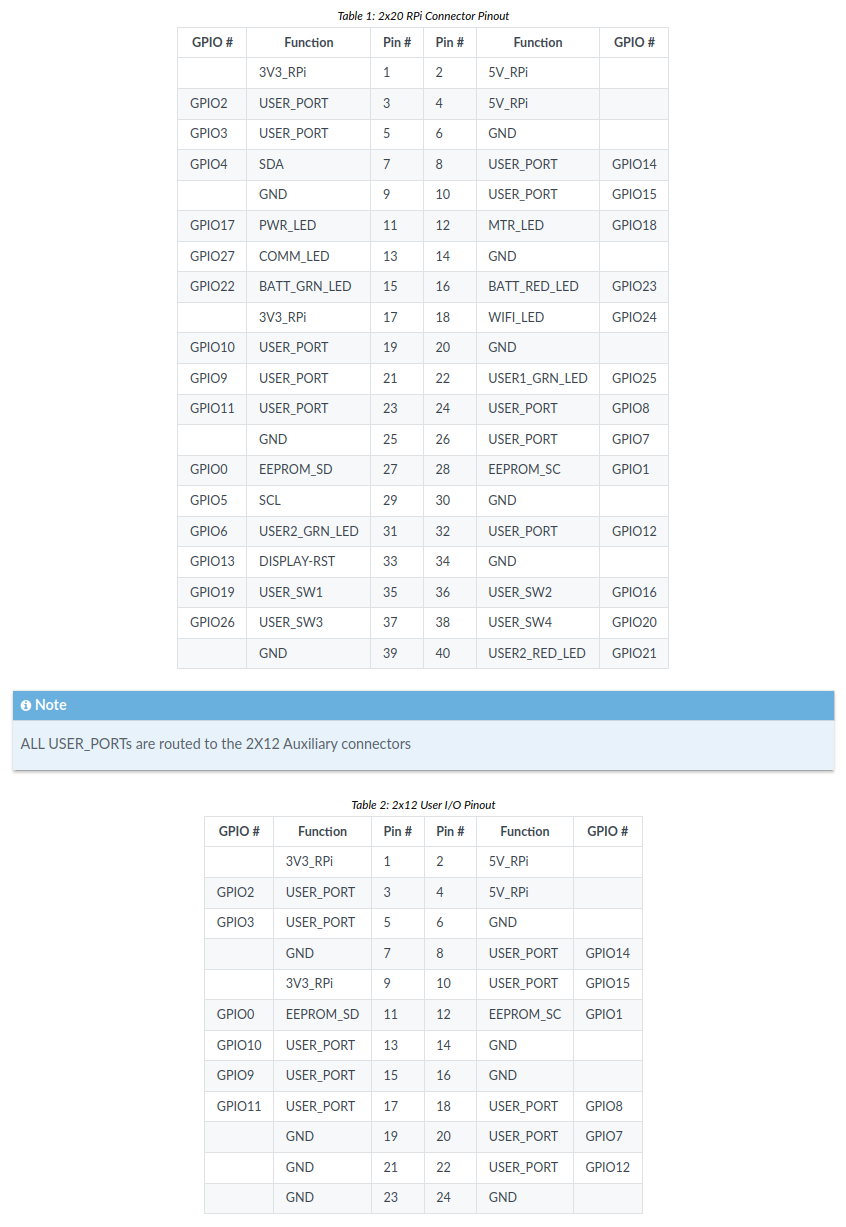
위 사진을 참고하여 2*12 User I/O Pin에 꽂으려면 다음과 같이 꽂으면 된다.
|
Turtlebot4 (2*12)
|
TOF 센서
|
|
Pin # 1
|
VIN
|
|
GND 아무곳에나
|
GND
|
|
Pin # 3
|
SDA
|
|
Pin # 5
|
SCL
|
반응형
'인턴' 카테고리의 다른 글
| TOF 센서 데이터를 ROS로 Publish (0) | 2025.02.27 |
|---|---|
| Turtlebot4에 TOF 센서 연결하는법 - 2 (0) | 2025.02.27 |
| Turtlebot4 navigation (nav2) (0) | 2025.02.05 |
| [Troubleshooting] Turtlebot4 fixed red light error (2) | 2025.02.05 |
| Turtlebot4로 SLAM + 로컬에서 시각화(Rviz) (0) | 2025.01.26 |
'인턴' Related Articles
more



