
반응형
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- ROS
- python
- Linux
- 자율주행
- 운영체제 #page replacement algorithm
- create3
- ros #rviz #onedayproject #Lane Keeping #Lane Changing #차선 변경
- 디지털시스템설계 #verilog #module #port #구조문
- 프로그래머스
- 자윯주행
- 자율주행 #opencv #perception #control #제어 #인지
- turtlebot4
- morai #자율주행 #데브코스 #planning&control #ros #ubuntu
- 데이터베이스 #정규화 #이상현상 #함수종속
- turtlebot
- pathplanning
- ubuntu
- TOF
- MORAI
- Raspberry Pi
- Gazebo
- 데브코스
- ROS2
- Slam
- 운영체제 #working set #working set algorithm #file system
- 인턴
- planning
- rviz
- 프로그래머스 #데브코스 #자율주행
- control
Archives
쓰레기 개발자
TOF 센서 데이터를 ROS로 Publish 본문
프로젝트 개요
이 문서는 ROS를 활용하는 다른 노드들과 같이 쓰기 위해 TOF 센서의 raw 데이터를 변환하여 ROS topic으로 발행하는 법을 기술한 문서이다.
ROS로 publish
하나의 repo는 회사 repo이므로 비공개 처리했다.
https://github.com/gksma/tof_vis
git clone https://github.com/gksma/tof_vis.git그 후에 /회사 깃허브/vl53l8cx_python 폴더에 들어가서 VL53L8CX driver를 설치해준다.
cd <회사 깃허브>/vl53l8cx_python/
sudo python3 setup.py install설치가 됐다면 이번엔 tof_vis로 들어가 colcon build를 해주고 source 설정도 해준다.
cd /tof_vis
colcon build
source install/setup.bash
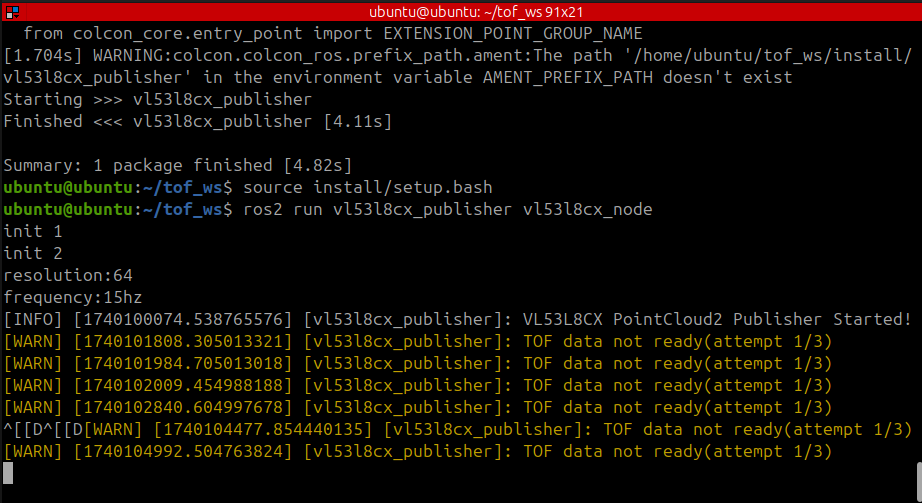
이제 다음 명령으로 tof 데이터를 ros로 publish하는 노드를 실행한다.
ros2 run vl53l8cx_publisher vl53l8cx_node
정상적으로 실행이 됐다면 다음과 같이 메세지가 뜰 것이다.
init 1
init 2
resolution:64
frequency:15hz
[INFO] [1740030238.401766072] [vl53l8cx_publisher]: VL53L8CX PointCloud2 Publisher Started!
이제 도커로 가서 rviz로 시각화를 해보면 다음과 같이 결과가 잘 나오는것을 볼 수 있다.
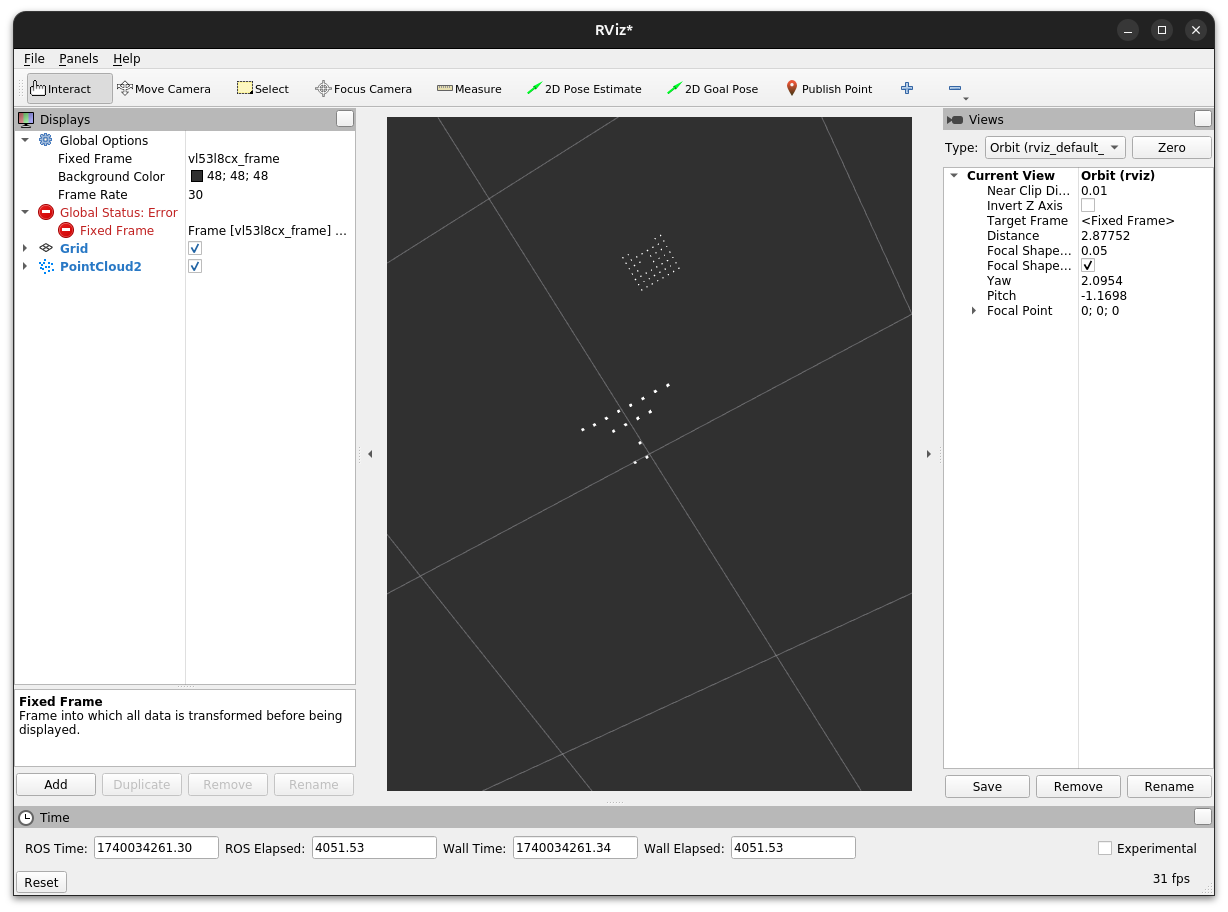
장애물과의 거리에 따라 z축의 값이 달라진다.
Troubleshooting
1. publish node 종료되는 이슈
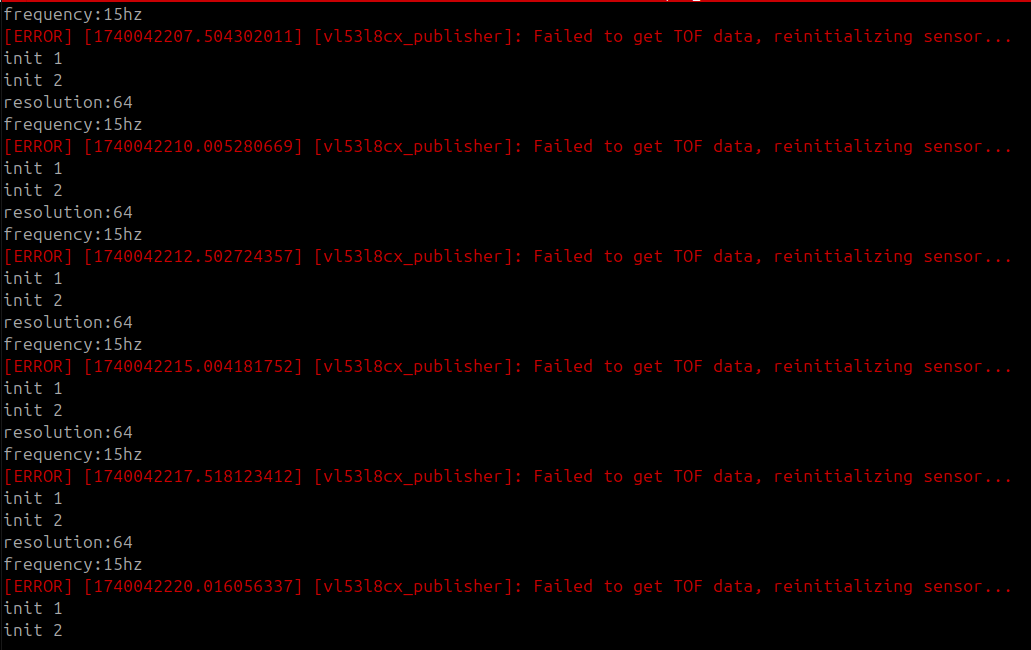
해결 : if not distance_values 일때 원래는 바로 sensor를 재시작 하는 시도를 했는데 fail_count 변수를 추가하고 fail_count == 3일때까지 대기하게 짜줬다.
위 사진과 같이 fail_count가 1이 될때쯤에 데이터를 정상적으로 받아오게되면, fail_count = 0으로 초기화하고 다시 데이터를 받는것을 볼 수 있다.
2. CPU 사용량 점차 증가
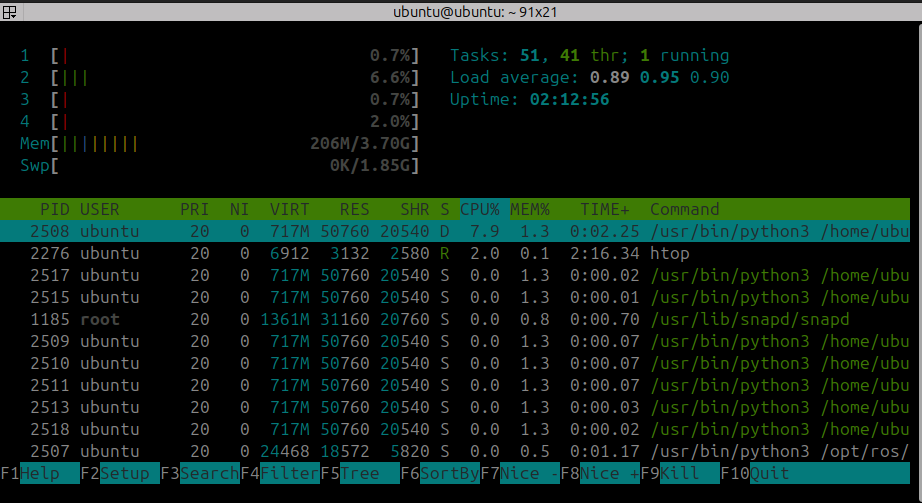
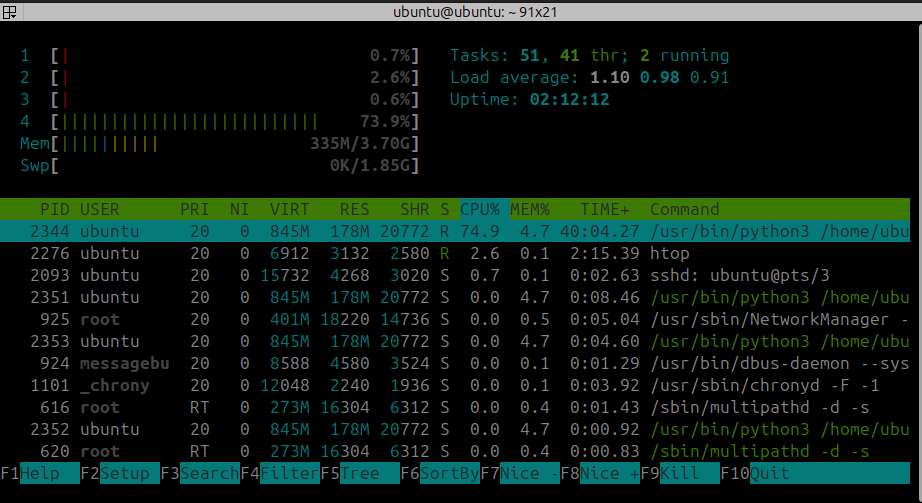
첫번째 사진이 publish node를 켠 직후고 두번째 사진이 켜고 40분이 지났을 때다. CPU 사용량이 점점 늘어나는것을 볼 수 있다.
1차 해결법 :
def read_tof_data(self):
"""TOF 센서에서 실제 거리 데이터를 읽고 XYZ 좌표로 변환"""
try:
distance_values = self.sensor.get_data() # 기존 visualize 코드 방식 적용
if not distance_values:
self.get_logger().error("Failed to get TOF data, reinitializing sensor...")
self.sensor._initialize_driver() # 센서 다시 초기화
return None
# 거리 데이터를 저장할 배열 초기화
distance_value = np.full((64,), 4000, dtype=np.float32) # 기본값 4000mm (센서 읽기 오류 대비)
for i in range(len(distance_values)):
zone = distance_values[i]['zone']
status = distance_values[i]['Status']
if status == 5: # 유효한 거리 데이터만 반영
distance_value[zone] = distance_values[i]['Distance(mm)']
# 3D 좌표 변환 (z는 실제 거리값)
buf = np.empty((self.res, self.res, 3), dtype=np.float32)
flipped_data = np.fliplr(distance_value.reshape(8, 8)) # `visualize.py`와 동일하게 좌우 반전
for i in range(8):
for j in range(8):
x = (i - 3.5) * 0.05 # 가로 위치 보정
y = (j - 3.5) * 0.05 # 세로 위치 보정
z = flipped_data[i, j] / 1000.0 # mm -> m 변환
buf[i, j] = [x, y, z]
return buf
except Exception as e:
self.get_logger().error(f"Error reading TOF data: {e}")
return None
read_tof_data 함수에서 buf는 새로운 배열을 생성하기만 할 뿐 데이터를 해제하진 않는다. 기존에 할당된 데이터를 해제해주는 코드를 추가해준다.
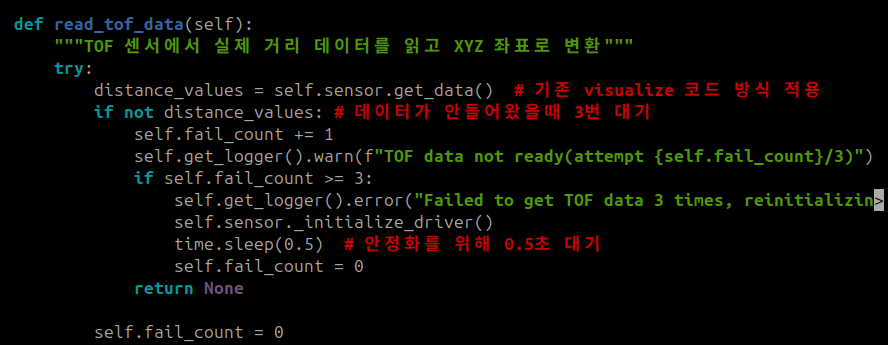
def read_tof_data(self):
"""TOF 센서에서 실제 거리 데이터를 읽고 XYZ 좌표로 변환"""
try:
distance_values = self.sensor.get_data() # 기존 visualize 코드 방식 적용
if not distance_values: # 데이터가 안들어왔을때 3번 대기
self.fail_count += 1
self.get_logger().warn(f"TOF data not ready(attempt {self.fail_count}/3)")
if self.fail_count >= 3:
self.get_logger().error("Failed to get TOF data 3 times, reinitializing sensor...")
self.sensor._initialize_driver()
time.sleep(0.5) # 안정화를 위해 0.5초 대기
self.fail_count = 0
return None
self.fail_count = 0
# 거리 데이터를 저장할 배열 초기화
distance_value = np.full((64,), 4000, dtype=np.float32) # 기본값 4000mm (센서 읽기 오류 대비)
for i in range(len(distance_values)):
zone = distance_values[i]['zone']
status = distance_values[i]['Status']
if status == 5: # 유효한 거리 데이터만 반영
distance_value[zone] = distance_values[i]['Distance(mm)']
# 기존 buf 초기화(메모리 누수 방지)
if hasattr(self, "last_buf") and self.last_buf is not None: # 기존 배열이 있을때만
del self.last_buf
self.last_buf = None
# 3D 좌표 변환 (z는 실제 거리값)
buf = np.empty((8, 8, 3), dtype=np.float32)
flipped_data = np.fliplr(distance_value.reshape(8, 8)) # `visualize.py`와 동일하게 좌우 반전
for i in range(8):
for j in range(8):
x = (i - 3.5) * 0.05 # 가로 위치 보정
y = (j - 3.5) * 0.05 # 세로 위치 보정
z = flipped_data[i, j] / 1000.0 # mm -> m 변환
buf[i, j] = [x, y, z]
self.last_buf = buf # last_buf로 저장
return buf
except Exception as e:
self.get_logger().error(f"Error reading TOF data: {e}")
return None
buf로 배열을 생성하고, 함수의 끝에 last_buf로 저장한다.
self.last_buf = buf # last_buf로 저장
return buf
그리고 buf를 반환하고 다시 tof에서 받아온 데이터를 buf를 생성하여 넣기전에 기존에 있던 last_buf가 있다면 배열을 삭제하고 메모리 누수를 막는다.
if hasattr(self, "last_buf") and self.last_buf is not None: # 기존 배열이 있을때만
del self.last_buf
self.last_buf = None
하지만 여전히 cpu 사용량이 증가하는 문제는 해결하지 못하였다.
2차 해결법을 생각하려 했지만 인턴이 내일부로 끝나서 문서 정리중이다.. 해결하고 가지 못한게 아쉽다
반응형
'인턴' 카테고리의 다른 글
| Turtlebot4에 TOF 센서 연결하는법 - 2 (0) | 2025.02.27 |
|---|---|
| Turtlebot4에 TOF 센서 연결하는법 - 1 (0) | 2025.02.06 |
| Turtlebot4 navigation (nav2) (0) | 2025.02.05 |
| [Troubleshooting] Turtlebot4 fixed red light error (2) | 2025.02.05 |
| Turtlebot4로 SLAM + 로컬에서 시각화(Rviz) (0) | 2025.01.26 |
'인턴' Related Articles
more



