
반응형
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- 자율주행 #opencv #perception #control #제어 #인지
- 인턴
- 프로그래머스 #데브코스 #자율주행
- MORAI
- turtlebot
- Slam
- Linux
- ubuntu
- 운영체제 #page replacement algorithm
- control
- morai #자율주행 #데브코스 #planning&control #ros #ubuntu
- 자율주행
- 자윯주행
- ROS2
- 데이터베이스 #정규화 #이상현상 #함수종속
- 프로그래머스
- ros #rviz #onedayproject #Lane Keeping #Lane Changing #차선 변경
- 디지털시스템설계 #verilog #module #port #구조문
- turtlebot4
- TOF
- ROS
- python
- pathplanning
- create3
- 데브코스
- Raspberry Pi
- rviz
- 운영체제 #working set #working set algorithm #file system
- planning
- Gazebo
Archives
쓰레기 개발자
20240426 One Week Project 본문
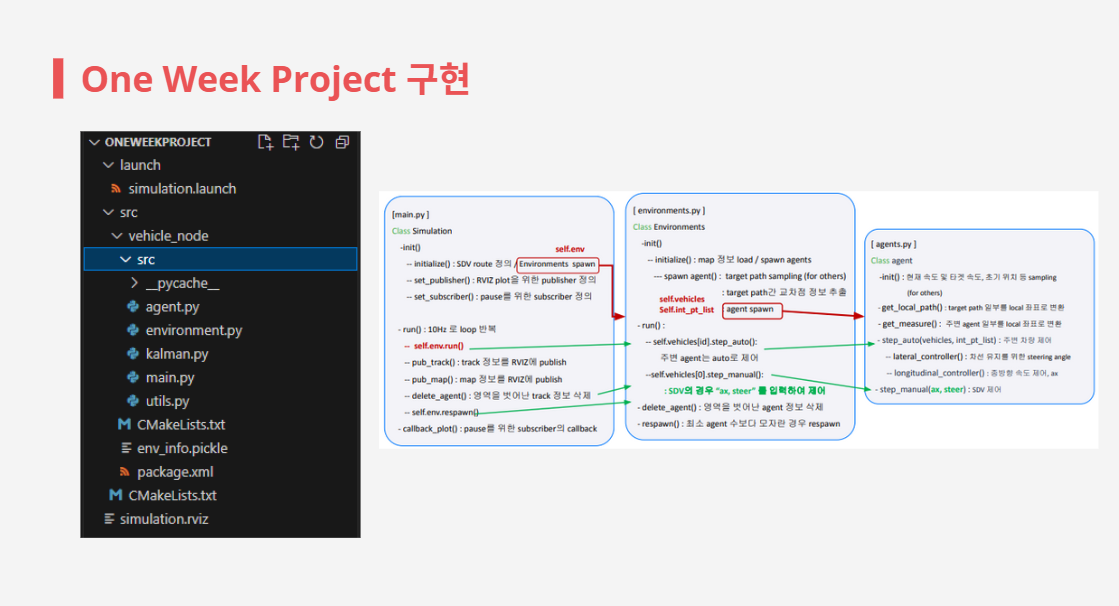
위는 One Week Project 구현 과정이다.
주어진 코드 외에 kalman.py 파일을 만들고 칼만 필터에 대한 코드를 작성했다. utils.py에는 local path 좌표로 변환하는 과정과 0번 vehicle(SDV)이 다른 차량의 센서 정보를 받고 차량의 진행 방향과 겹치면 일시 정지하는 방식으로 구현하려고 했다. 하지만 칼만 필터를 구현하는 과정에서 에러들이 있었다. 노이즈를 제대로 거르지 못하고 값이 보정이 되지 않고 오히려 크게 튀는 현상이 생겼다. 해결하려고 칼만 필터를 여러번 수정했으나 마감 기한까지 제대로 수정하지 못했다..
일단 노이즈 값을 0으로 설정하고 나머지 알고리즘들이 제대로 작동하는지 확인을 먼저 해봤으면 어땠을까라는 생각이 들긴 한다. 강사님이 주신 코드를 보고 더 공부를 해야겠다.
반응형
'데브코스 자율주행 planning & control 2기' 카테고리의 다른 글
| 데브코스 자율주행 planning&control 2기를 마치며 (0) | 2024.06.17 |
|---|---|
| 240507 ~ 240614 최종프로젝트 (0) | 2024.06.17 |
| 20240422 one day & one week project (0) | 2024.04.22 |
| 20240417 데브코스 자율주행 one day project (0) | 2024.04.17 |
| 20240415 데브코스 자율주행 one day project (0) | 2024.04.15 |
'데브코스 자율주행 planning & control 2기' Related Articles
more


